








Японският лунен модул SLIM ще бъде в спящ режим до средата на февруари
Тогава Слънцето отново ще може да захранва батериите на модула
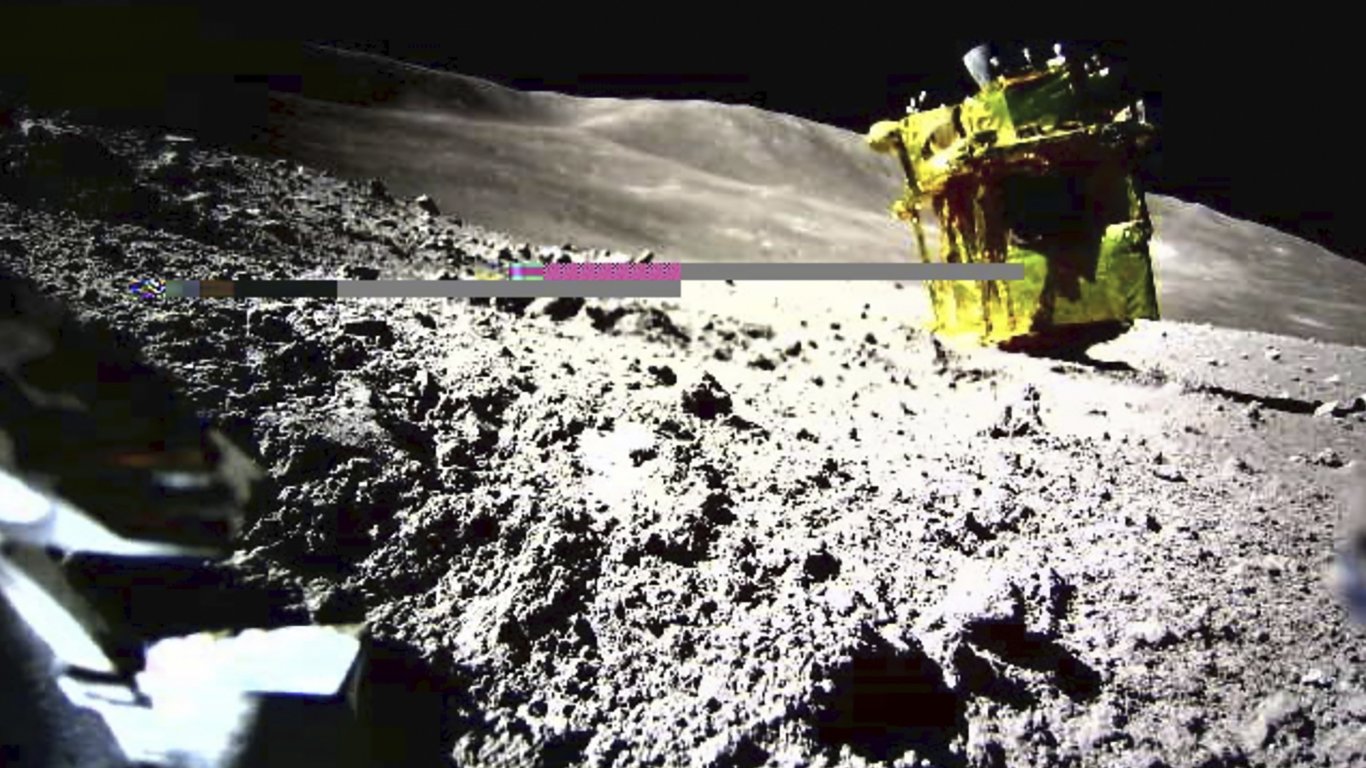
Първият японски модул за изследване на Луната SLIM (Smart Lander for Investigating Moon) премина в спящ режим. Причината е недостиг на енергия, която се осигурява от слънчеви батерии, съобщава японската информационна агенция Киодо, цитирана от БТА.
По данни на ДЖАКСА модулът ще се опита да възобнови своята работа в средата на февруари, когато Слънцето отново ще може да захранва батериите на модула.
Няколко часа след кацането на Луната на 20 януари апаратът бе изключен заради проблеми със захранването със слънчева енергия. Работата му се възстанови на 29 януари, когато стана възможно зареждането на батериите, по всяка вероятност заради смяна на ъгъла на падането на слънчевите лъчи върху Луната. Както отбелязва ДЖАКСА, по време на последната 12-часова работна сесия, модулът с помощта на спектроскопични камери анализира лунната почва в района на кацане.
Япония стана петата държава в света, която успешно осъществи кацане на естествения спътник на Земята след САЩ, бившия СССР, Китай и Индия. Японският апарат кацна на около 55 метра от целта си, в района на Шиоли (Shioli) от видимата част на Луната. Така специалистите от ДЖАКСА изпълниха задачата за свръхпрецизно кацане в радиус от не повече от 100 метра от целта.
Модулът SLIM с височина 2,4 метра и тегло 200 килограма е предназначен да изучава кратерите и релефа на Луната с помощта на технологии, подобни на тези, използвани в системите за разпознаване на лица. Апаратът е оборудван със специална техника, която може да измерва съдържанието на желязо и други елементи в скалите на лунната повърхност. Данните, събрани от SLIM, ще бъдат използвани в програмата "Артемис" ("Артемида") на НАСА.
Японският модул е оборудван и с два малки робота. Планирано е всеки от тях да използва собствена широкоъгълна камера, за да прави снимки след кацането. Роботът LEV-1 с височина 30 сантиметра използва пружини за придвижване. Той действа и като устройство за записване и предаване на данни обратно на Земята. Роботът LEV-2 е с форма на топка с диаметър около 8 сантиметра и тежи 250 грама.




















































































































;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}