








10 дни след кацането си на Луната: Японският модул SLIM възобнови работата си
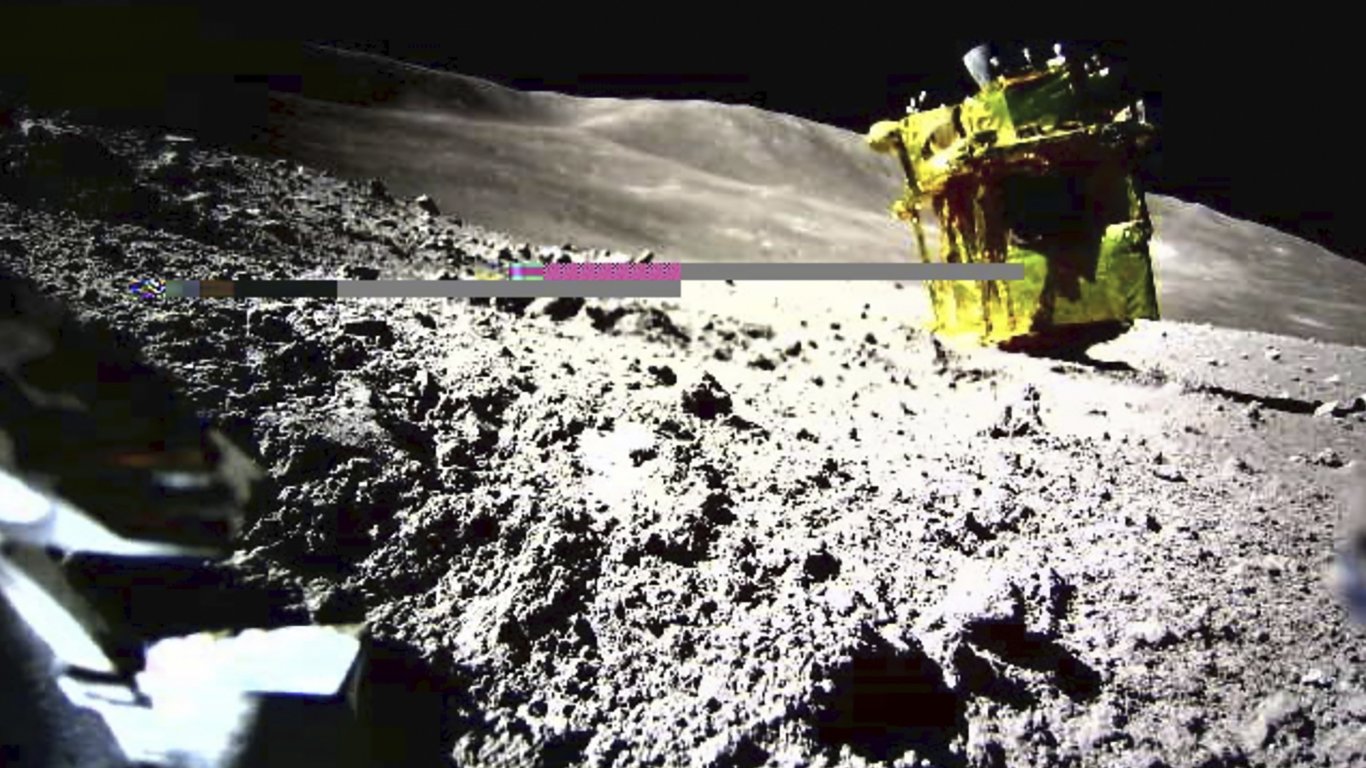
Японската космическа агенция публикува и направена от модула снимка на лунната повърхност, на която се вижда скалата, наречена "Той Пудел"
Почти десет дни след историческото си кацане на Луната японският модул SLIM е възобновил работата си, след като електрозахранването му беше прекъснато заради проблеми със слънчевите батерии, съобщи от японската Агенция за изследване на космическото пространство (ДЖАКСА), цитирана от световните агенции и БТА.
Още по темата
"Комуникацията със SLIM беше успешно установена и операциите бяха възобновени", написа японската космическа агенция в социалната мрежа Екс (бивш Туитър).
От ДЖАКСА посочиха още, че апаратът "незабавно" е започнал научните си наблюдения.
Японската космическа агенция публикува и направена от модула снимка на лунната повърхност, на която се вижда скалата, наречена "Той Пудел".
Япония успешно приземи високотехнологичния си апарат SLIM (Smart Lander for Investigating Moon) на Луната в ранните часове на 20 януари. Първоначално обаче се той се сблъска с проблеми, тъй като слънчевите му батерии спряха да подават енергия. След това ДЖАКСА изключи захранването на спускаемия апарат, за да го съхрани за рестартиране на по-късен етап.
Японската космическа агенция тогава отбеляза, че след известно време ъгълът на слънчевите лъчи върху Луната ще се промени и модулът ще може да възобнови работата си, след като започне да получава енергия.
Осъществявайки меко кацане на Луната, Япония стана едва петата страна в света с подобно постижение след САЩ, бившия СССР, Китай и Индия.
По-рано беше съобщено, че спускаемият апарат е успял да кацне само на 55 метра от набелязаната си цел, което беше окачествено като много висока степен на точност. Така специалистите от ДЖАКСА изпълниха задачата за свръхпрецизно кацане в радиус от не повече от 100 метра от целта.
Модулът SLIM с височина 2,4 метра и тегло 200 килограма е предназначен да изучава кратерите и релефа на Луната с помощта на технологии, подобни на тези, използвани в системите за разпознаване на лица. Апаратът е оборудван със специална камера, която може да измерва съдържанието на желязо и други елементи в скалите на лунната повърхност.
Японският модул беше оборудван и с два малки робота, които успешно достави на лунната повърхност. Планирано е всеки от тях да използва собствена широкоъгълна камера, за да прави снимки. Роботът LEV-1 с височина 30 сантиметра използва пружини за придвижване. Той действа и като устройство за записване и предаване на данни обратно на Земята. Роботът LEV-2 е с форма на топка с диаметър около 8 сантиметра и тежи 250 грама.
Данните, събрани от SLIM, ще бъдат използвани като част от ръководения от САЩ проект "Артемис" ("Артемида") на НАСА. Целта на програмата на американската космическа агенция е да изпрати хора отново на Луната след повече от 50 години. Мисията "Артемис 3" за кацане на естествения спътник на Земята обаче нeотдавна беше отложена за септември 2026 г.
























































































































;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}
;void(0);){kind=link}